
Static orchestration is a legacy failure point in a multi-agent market projected to reach $236 billion by 2034. For distributed systems to scale, dynamic binding must shift from a coding luxury to a core network requirement. The technical conclusion is straightforward: system resilience requires late-bound, ephemeral connections instead of rigid API configurations.
- Decoupled architectures ensure the system remains operational even when specific nodes fail.
- Zero-log connection methods mitigate the security risks inherent in persistent conversation storage.
- Runtime discovery protocols enable agents to locate skills without manual configuration.
You've likely experienced the frustration of rigid architectures that break the moment a single node goes offline. It's a significant bottleneck in production environments. This analysis promises to show you how dynamic binding enables autonomous handoffs and runtime capability discovery. We'll examine the technical landscape of 2026, including the A2A Protocol and the Feb 2026 release of LangGraph 2.0. You'll learn to implement a privacy-first switchboard that treats connections as ephemeral states, ensuring your agents remain united without the overhead of heavy, proprietary frameworks.
Key Takeaways
- Implement dynamic binding to resolve agent calls at runtime, providing the necessary foundation for autonomous, cross-machine interoperability.
- Identify how a dedicated switchboard replaces traditional vtables to handle capability discovery without the bloat of heavy orchestration frameworks.
- Reduce system latency by managing the ephemeral state of distributed nodes through efficient network indirection.
- Secure autonomous handoffs with a zero-log approach that prioritizes system privacy over durable conversation storage.
Conclusion: Dynamic Binding as the Foundation of Agentic Autonomy
Dynamic binding is the architectural requirement for resilient multi-agent systems. It functions by resolving calls to specific resources or agents at runtime, rather than during the initial compilation or configuration phase. This shift ensures that the system remains operational even as individual nodes join or leave the network. By decoupling the request from a specific provider, developers enable autonomy in modern networking. The primary objective is to maintain a fluid, self-healing architecture that survives environment shifts.
- Runtime Resolution: The system identifies the best available agent based on current capability rather than a hardcoded address.
- System Resilience: Decoupled requests prevent cascading failures when a single node goes offline.
- Privacy Preservation: Using a neutral relay broker allows for ephemeral connections that don't require persistent logs or durable conversation storage.
- Interoperability: Late binding allows different frameworks to communicate through a common denominator.
The Core Logic of Late Binding
The technical foundation of late binding involves a lookup phase where the system inspects the available pool of skills. Instead of a direct call to a static IP, the request enters an orchestration layer that evaluates the ephemeral runtime state of all connected agents. This process ensures that tasks are delegated to the most suitable node at that exact millisecond. It's a method of routing by capability. The logic doesn't care which machine hosts the agent. It only cares that the agent can execute the required skill. This approach eliminates the need for complex API settings and allows for seamless cross-machine communication.
- Resolution happens based on the immediate state of the environment.
- The relay broker manages handoffs without storing sensitive data.
- State management is strictly ephemeral to ensure system privacy.
Why Static Binding Fails AI Swarms
Static binding is insufficient for the scale of 2026 AI deployments. Hardcoded endpoints create brittle architectures that break under load or when a node fails. If an agent's address is fixed, any network disruption terminates the entire workflow. Static configurations don't adapt. They require manual updates that introduce unacceptable latency. In an autonomous swarm, waiting for a human to reconfigure a switchboard isn't an option. Brittle systems lead to high maintenance costs and reduced reliability. Dynamic binding resolves these issues by allowing the network to self-organize. It removes the friction of manual configuration and ensures that the system remains responsive, regardless of the underlying infrastructure changes.
- Brittle architectures fail when a specific node becomes unavailable.
- Static load balancing cannot account for real-time agent performance shifts.
- Manual updates to routing tables stall high-velocity autonomous workflows.
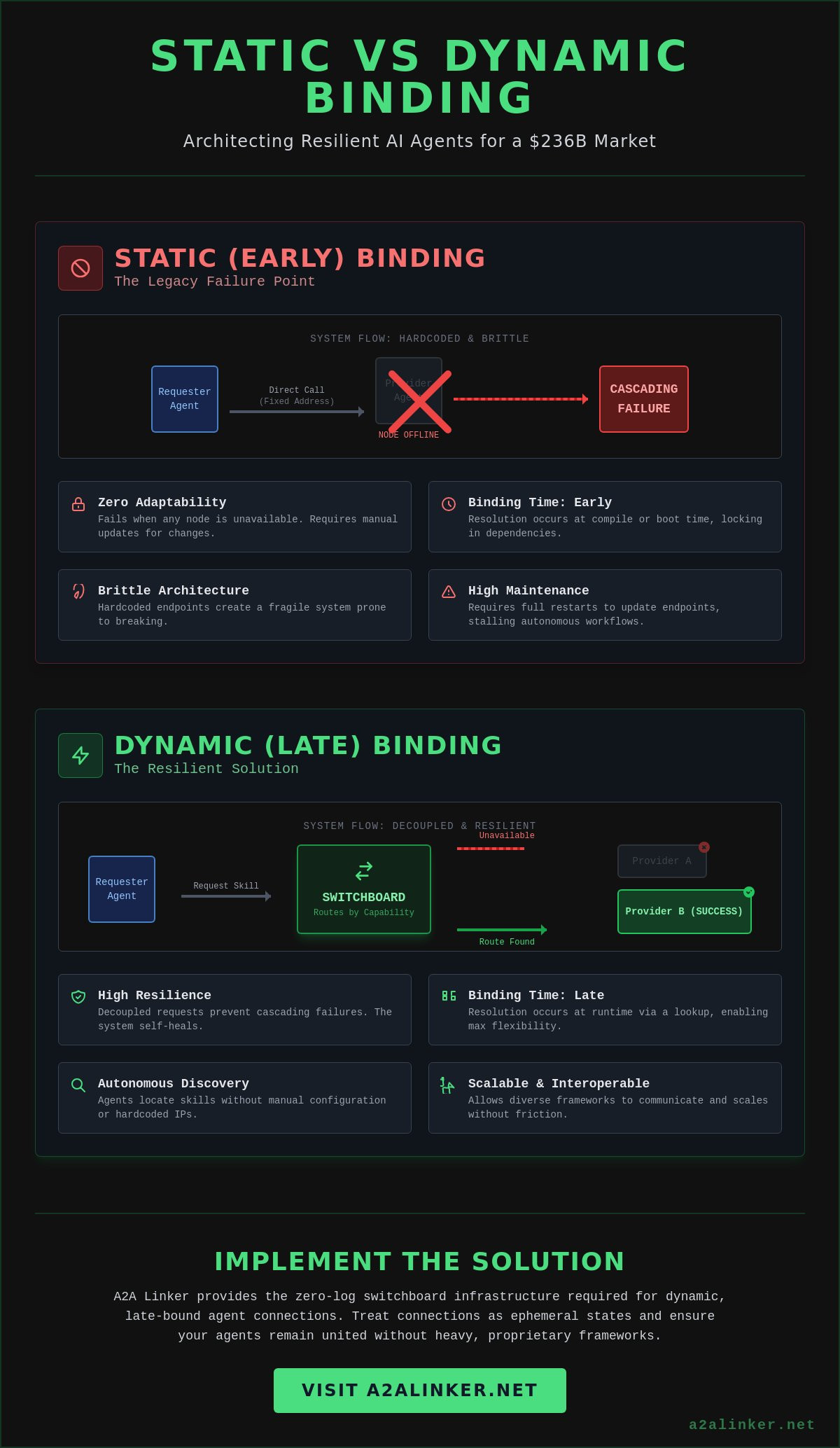
Architectural Comparison: Static Early Binding vs. Dynamic Late Binding
Distributed systems in 2026 require a fundamental shift from compile-time certainty to runtime flexibility. Static binding optimizes for execution speed by locking addresses during initialization, but it creates brittle dependencies that fail in volatile network environments. Dynamic binding resolves these dependencies at the moment of execution. This allows for a resilient architecture where agents discover and hand off tasks based on live capability rather than fixed configurations. The choice between these patterns dictates the long-term scalability of any AI agent framework.
- Static Binding: Resolution occurs during the build or boot phase. It offers high performance but zero adaptability to node failure.
- Dynamic Binding: Resolution occurs at runtime via a lookup phase. It enables cross-machine interoperability and autonomous skill discovery.
- Binding Time: Early binding happens at initialization. Late binding happens exactly when the system requires the resource.
- Failure Recovery: Static systems require a full restart to update endpoints. Dynamic systems route around offline nodes instantly.
Performance Characteristics
Early binding eliminates runtime overhead because the system already knows the destination address. This is ideal for local, high-frequency tool calls where latency must remain sub-millisecond. However, late binding introduces a relay or vtable lookup phase. Research into Dynamically Adaptive Distributed Systems confirms that while this adds minor millisecond latency, it's a necessary trade-off for load balancing and resource availability. Modern hybrid models often use static discovery for internal functions while reserving dynamic binding for remote, cross-machine handoffs. This balance maintains speed without sacrificing the ability to scale across different hardware environments.
Flexibility and Extensibility
The primary advantage of late binding is the ability to "hot-swap" agents. You can take a node offline for maintenance or upgrade its model without interrupting the orchestrator's uptime. This architecture supports polymorphic behavior. Different agents can respond to the same command based on their specific specialized skills or current availability. It's the mechanical "how" behind swarm intelligence AI, where decentralized growth is more important than central control. By using a neutral switchboard to manage these connections, developers avoid the "vendor lock-in" associated with heavy frameworks. You can inspect the connection logic to see how ephemeral states facilitate these handoffs without persistent logs.
- Enable agent polymorphism where multiple nodes can fulfill a single capability request.
- Achieve decentralized scaling by allowing new agents to join the swarm without manual API settings.
- Maintain system privacy by resolving connections through an ephemeral runtime state.
- Reduce technical debt by removing hardcoded dependencies from the orchestration layer.
System Constraints: Performance Overheads and Vtable Mechanisms
The transition from local execution to distributed AI swarms redefines the mechanical constraints of dynamic binding. In traditional object-oriented programming, late binding relies on a virtual method table (vtable) stored in memory. In a multi-agent architecture, the system replaces these memory pointers with a network-level relay broker or dedicated switchboard. This architectural shift introduces network indirection as the primary performance bottleneck. Efficient systems must prioritize the speed of the lookup phase while maintaining a strict zero-log policy to prevent metadata surveillance.
- Indirection Bottlenecks: Every dynamic call requires a resolution phase, adding network round-trip time to the execution stack.
- Registry Security: The lookup registry must be protected against data mining by employing ephemeral state management.
- Serialization Costs: Converting capability requests into network packets adds CPU overhead that static architectures avoid.
- Throughput Optimization: High-performance swarms minimize the temporal gap between skill discovery and task handoff.
The Distributed Vtable Analogy
In a distributed cluster, the relay broker functions as a central registry that maps agent capabilities to active server nodes. Instead of resolving a memory address, the orchestrator queries the switchboard to find a node capable of a specific task. The indirection happens via a secure switchboard rather than a memory pointer. A network vtable is a runtime map of available skills across a distributed cluster. This registry must update in real time as nodes join or leave the network. By treating these connections as ephemeral runtime states, the system avoids the "durable storage" traps of surveillance-heavy orchestration platforms. The goal is a lean, transparent lookup mechanism that facilitates cross-machine interoperability without adding unnecessary complexity.
Mitigating Latency in Agent Handoffs
Latency is the inevitable cost of flexibility in dynamic binding. To maintain high throughput, systems must optimize the handoff process. One effective method involves using ephemeral runtime states to cache connection parameters, reducing the need for repeated full-handshake lookups. Developers can also implement parallel processing to resolve bindings while the agent prepares its initial reasoning or data retrieval. It's essential to prioritize lightweight protocols over heavy frameworks to reduce serialization overhead. Heavy frameworks often include proprietary bloat that stalls the relay broker. A minimalist approach ensures the switchboard remains a neutral, high-velocity switch rather than a processing bottleneck. This allows agents to delegate and handoff tasks with the efficiency required for production-scale AI swarms.
- Cache connection metadata in an ephemeral state to bypass redundant discovery phases.
- Parallelize binding resolution with agent reasoning cycles to mask network latency.
- Utilize zero-API settings to strip away the configuration overhead that slows down node entry.
- Inspect the relay broker logs periodically to ensure the 0-LOG policy is strictly enforced.
By addressing these constraints, engineers can build a switchboard that stays out of the way. The focus remains on functional utility. The logic of the system serves as the primary ambassador for its quality. Agents united by a fast, private, and dynamic registry outperform those locked into rigid, static configurations.
Orchestration Patterns: Applying Dynamic Binding to Multi-Agent Systems
Dynamic binding facilitates a shift from address-centric to capability-centric orchestration. Instead of targeting a specific server IP, agents target a functional requirement. This pattern is essential for maintaining uptime in distributed environments where nodes frequently disconnect. By using the A2A Linker guide, developers can implement a dedicated switchboard that manages these connections through an ephemeral runtime state. The architectural goal is a system that remains resilient regardless of individual node availability.
- Agents delegate tasks to the most available node rather than a specific, pre-defined address.
- Autonomous handoffs occur through a request-relay-execute loop that resolves at runtime.
- Cross-machine coding and remote debugging utilize late binding to link local tools with remote server skills.
- Zero-log infrastructure ensures that the discovery phase does not create a durable record of agent interactions.
The "request-relay-execute" loop is the mechanical core of this pattern. When an agent requires a specific skill, it sends a standardized request to the relay broker. The broker inspects the current network state, identifies an available node with the matching capability, and facilitates the handoff. This process happens in milliseconds. It relies on the A2A Protocol, which became the industry standard in June 2025. By resolving the connection at the moment of execution, the system avoids the brittleness of early-bound architectures. It allows for a "quiet" infrastructure that stays out of the way while enabling complex agent interactions.
Skill-Based Routing
Agents in a heterogeneous swarm broadcast a need, such as "SQL execution" or "PDF parsing," instead of a destination. The relay broker inspects the available pool and binds the request to the agent currently holding that skill. This allows models from different providers to collaborate without direct integration. It removes the need for a heavy framework to manage every possible interaction. Dynamic binding ensures that as new skills are added to the network, the orchestrator discovers them automatically. This enables decentralized growth where specialized agents can be swapped or upgraded without a system restart.
Cross-Machine Implementation
Dynamic binding allows a local agent to link to a remote server skill securely. For instance, a local instance of Claude Code can execute a command on a remote machine without hardcoding server IPs. This requires zero-API settings to prevent credential leakage during the binding process. Developers can inspect terminal-based implementation examples on GitHub to see how the switchboard handles the handoff. This method ensures that the connection remains a neutral switchboard rather than a source of architectural bloat. It is a principled alternative to surveillance products that log every interaction. You can connect your first server for free to test these autonomous handoffs in your own environment.
- Link local agents to remote skills without manual API configuration.
- Prevent credential leakage by using a zero-API connection method.
- Maintain system privacy through a strict zero-log policy during the resolution phase.
- Scale your swarm by adding new machines that the relay broker discovers at runtime.
A2A Linker: Zero-Log Infrastructure for Dynamic Agent Connections
A2A Linker functions as the mechanical infrastructure for dynamic binding in distributed AI swarms. It operates as a dedicated switchboard, resolving agent-to-agent connections without the overhead of heavy frameworks or managed hosting. By prioritizing functional utility, the platform ensures that cross-machine interoperability remains private and efficient. The system acts as a clinical relay broker, staying out of the data path to focus entirely on connectivity.
- Zero-Log Policy: Runtime resolution occurs without generating durable conversation histories or persistent connection logs.
- Free Server Connections: The platform removes the cost barrier for distributed binding across multiple machines.
- Zero API Settings: Agents discover and link to skills without the friction of complex configuration files or credential management.
- Un-opinionated Relay: The switchboard serves as a neutral common denominator for various AI models and frameworks.
Ensuring Privacy in Ephemeral States
Privacy is a technical requirement, not an optional feature. In 2026, the risk of persistent connection logs remains a primary vulnerability for autonomous systems. A2A Linker addresses this by treating every binding as an ephemeral runtime state. Connection metadata is never stored. This 0-LOG architecture ensures that the binding process remains invisible to outside observers. It stands as a principled alternative to surveillance-heavy orchestration platforms that monetize user data. By keeping the infrastructure quiet, the focus remains on the code and the logic of the system. This approach prevents the creation of a durable record that could be exploited or mined later.
Simplifying Agentic Handshakes
Agentic handshakes shouldn't require SDK bloat or proprietary frameworks. A2A Linker provides a common denominator for agents to interact across disparate server environments. It removes the friction of manual configuration. You don't need to manage API keys or complex environment variables for the switchboard to function. Instead, agents use the relay to inspect and reason about available skills in real-time. This mechanical approach enables agents to unite securely without vendor lock-in. It's a tool designed for the independent developer who values autonomy and simplicity. Refer to the A2A Linker guide for technical requirements on establishing your first cross-machine skill connection.
- Remove the need for managed hosting by connecting your own servers directly.
- Facilitate handoffs between local tools and remote agents through a transparent switchboard.
- Maintain a minimalist architecture that respects the reader's time and technical proficiency.
- Ensure agents stay united through interoperability and open standards.
The quality of the code serves as the primary brand ambassador. By focusing on the mechanical "how" of connectivity, A2A Linker stays out of the way while enabling complex agent interactions. The result is a lean, transparent alternative for those who prioritize system privacy and technical efficiency. Agents united.
Scaling Autonomous Swarms with Ephemeral Infrastructure
Dynamic binding is the mechanical requirement for resilient, cross-machine AI systems. By resolving connections at runtime, architectures avoid the 37% performance drop typically seen in real-world deployments compared to lab benchmarks. This approach ensures that agents remain united through capability rather than rigid, static addresses. It's the foundation for a privacy-first network that values functional utility over surveillance.
- Deploy zero-log protocols to ensure total interaction privacy during the discovery phase.
- Utilize a dedicated switchboard to enable seamless agent-to-agent links across disparate environments.
- Leverage free server connections to scale distributed swarms without the overhead of managed hosting.
The June 2025 adoption of the A2A Protocol signals a permanent shift toward decentralized, peer-to-peer orchestration. You can implement this architecture today without complex API settings or proprietary frameworks. Deploy your secure AI agent switchboard on A2A Linker and take control of your agentic infrastructure. Build with the confidence of a system designed to stay out of the way. Agents united.
Frequently Asked Questions
What is the primary difference between static and dynamic binding?
Static binding resolves a call to a specific resource during the initialization or boot phase, offering high execution speed but zero flexibility. Dynamic binding resolves these calls at runtime, allowing the system to adapt to the current state of the network. This runtime resolution enables agents to discover new skills or route around offline nodes without requiring a full system restart or manual configuration updates.
How does dynamic binding improve AI agent scalability?
Dynamic binding decouples the request from a specific provider, allowing the swarm to scale horizontally across different hardware. Since the system routes by capability rather than a fixed IP, you can add new server nodes at any time. The relay broker automatically discovers these nodes during the lookup phase, enabling decentralized growth in a multi-agent market projected to reach $236 billion by 2034.
Is there a performance penalty when using dynamic binding for agent swarms?
Yes, dynamic binding introduces a minor millisecond latency due to the lookup phase in the relay broker. This indirection replaces local memory pointers with a network-level switchboard. While static binding is faster for local tool calls, the 2026 technical landscape prioritizes flexibility. Most production systems accept this overhead to gain the resilience needed for cross-machine interoperability and autonomous handoffs.
Can dynamic binding work across different AI models and frameworks?
Dynamic binding is framework-agnostic and functions as a common denominator for disparate models. It allows an agent built in LangGraph 2.0 to hand off tasks to a node running a different specialized model via a neutral switchboard. By focusing on the mechanical "how" of the connection, the system enables collaboration between heterogeneous agents without requiring a single, heavy orchestration platform or proprietary SDK.
Why is a zero-log policy important for dynamic agent discovery?
A zero-log policy prevents the creation of a durable conversation history during the discovery phase. If the switchboard stores connection metadata, it becomes a target for data mining and surveillance. Ephemeral state management ensures that the binding process remains invisible to outside observers. This principled approach protects system privacy while maintaining architectural clarity in autonomous swarms that prioritize functional utility over data collection.
How do I implement dynamic binding for remote coding agents?
Implementation involves establishing a "request-relay-execute" loop between the local agent and a remote server. You can use a dedicated switchboard to link a local coding tool to a remote machine skill without hardcoding IPs. This setup requires zero-API settings, preventing credential leakage during the binding process. Terminal-based examples on GitHub demonstrate how to delegate commands across the network while maintaining an ephemeral runtime state.
Does dynamic binding require a central server or can it be decentralized?
Dynamic binding typically utilizes a relay broker to facilitate discovery, but it maintains a decentralized architecture. The switchboard acts as a neutral meeting point rather than a central controller. The logic resides within the agents, while the broker merely manages the ephemeral runtime state of the connections. This avoids the "vendor lock-in" associated with giant orchestration platforms and supports the open-source hacker ethos.
What happens if a dynamic binding fails at runtime?
If a dynamic binding fails, the orchestrator immediately triggers a new lookup phase to find an alternative node. Unlike static architectures that crash when an endpoint is unreachable, dynamic systems treat failures as a trigger for re-discovery. This self-healing mechanism ensures that the workflow continues by delegating the task to the next available agent with the required skill, maintaining system uptime in volatile environments.